More Low Cost Automation solutions
The high flexibility provided by our modular concept is what makes Low Cost Automation so universally applicable. Depending on the application, a customised solution can be created from the construction kit and supplemented with other products. In addition to conventional or watertight igus® stepper motors, the robot joints can be combined with other motors or pneumatic drives. The joint construction kit is not tied to any special control system, allowing the greatest freedom in planning and implementing automation processes.

robolink® warehouse assistance
robolink® places individual parts on the appropriate warehouse shelvesrobolink® warehouse assistance

Automated book scanner
robolink® turns the pages in the book scannerAutomated book scanner
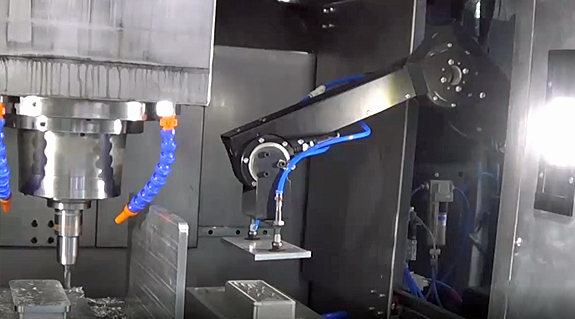
Machine tool
robolink® removes components from the machine toolMachine tool
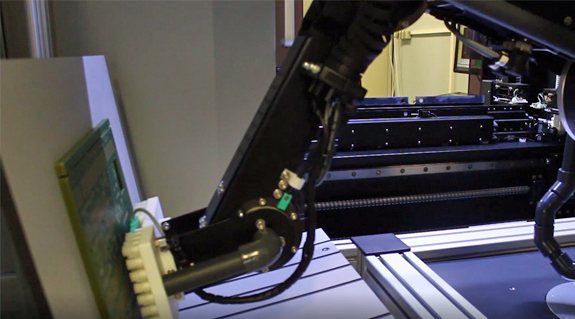
Quality control for printed circuit boards
robolink places printed circuit boards in a testing unitQuality control for printed circuit boards

Automated packaging of respirators
Automated packaging of respiratorsAutomated packaging of respirators

Expansion of partially automated machines
Expansion of partially automated machinesExtension of automated machines
