Modificarea limbii :
Software-ul igus Robot Control
Programați, simulați și controlați roboți fără licență
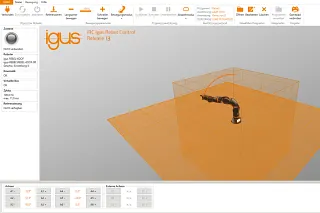
Software-ul igus Robot Control permite programarea simplă și intuitivă a roboților și a sistemelor de control, facilitând începerea automatizării. Datorită structurii modulare, pot fi controlate diverse cinematici ale roboților, de exemplu roboți delta, roboți liniari și roboți articulați multiaxiali. Software-ul poate fi utilizat pentru a simula mișcările individuale ale robotului pe suprafața 3D - robotul nu trebuie să fie conectat pentru acest pas.
Ce veți găsi pe această pagină
Software gratuit pentru roboți
Exemple de programare a diferitelor aplicații cu software-ul robotului
- Conexiune simplă între robot și sistemul de control
- Operarea intuitivă cu interfață 3D și geamăn digital permite executarea și verificarea directă a secvențelor de mișcare
- Configurarea interfeței camerei este posibilă direct prin intermediul sistemului de control și al software-ului
- Programarea roboților delta, liniari, SCARA și cu brațe articulate
- Software-ul permite testarea fără riscuri chiar înainte de cumpărare
Cerințe de sistem:
- PC cu sistem de operare Windows 10
- Comunicare prin Ethernet sau WLAN
- 500 MB de spațiu liber pe disc
Exemple de programe, wiki și cursuri de formare



Interfețe
Interfețe PLC
Interfața PLC (PLC = Programmable Logic Controller) permite executarea funcțiilor de bază și semnalizarea stărilor prin intermediul intrărilor și ieșirilor digitale. În plus față de controlul de către un PLC, această interfață permite, de asemenea, operarea prin intermediul butoanelor hardware.
Intrări și ieșiri digitale
Programele robotului pot fi încărcate și pornite, iar comenzile de prindere pot fi trimise prin intrări digitale sau semnale globale. Acest lucru este util, de exemplu, dacă un program trebuie selectat dintr-o anumită selecție utilizând butoane sau instrucțiunea CRI-GSig.
Modbus TCP/IP
Interfața Modbus TCP poate fi utilizată pentru a trimite date și instrucțiuni PLC către sistemul de control al robotului și pentru a primi informații de stare, de exemplu.
Interfață CRI
Interfața CRI permite trimiterea de instrucțiuni complexe și preluarea de informații și setări prin intermediul interfeței Ethernet utilizând TCP/IP. Controlul robotului igus utilizează această interfață pentru a se conecta la roboți cu un sistem de control integrat sau la alte instanțe ale sistemului de control.
Interfața camerei
Interfața camerei permite utilizarea camerelor de detectare a obiectelor și a camerelor video. Camerele de detectare a obiectelor recunosc poziția și clasa obiectelor și le transmit, opțional cu o imagine video, sistemului de control. Sistemul de control calculează pozițiile în sistemul de coordonate al robotului pornind de la pozițiile obiectelor din camera video. Camerele video pure transmit doar imagini și, prin urmare, pot fi utilizate doar pentru a monitoriza zona de lucru, dar nu și pentru a detecta obiecte.
> Obțineți informații mai detaliate despre interfața camerei
Nor
Interfața Cloud permite monitorizarea robotului prin intermediul RobotDimension. Odată activat și conectat, robotul trimite informații de bază privind starea și imagini ale camerei către serviciul online. Utilizatorul își poate lista roboții pe site și poate prelua informațiile.
ROS, Matlab, LabView și multe altele.
Integrați roboții în mediul dumneavoastră ROS. Documentație și pachete pentru comunicarea hardware, Teleop și moveI
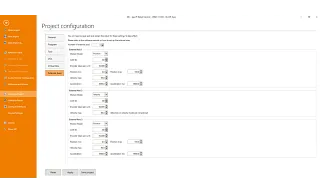
Configurații de proiect
Mâner
Unealta asamblată poate fi specificată aici. Schimbarea sculei necesită reîncărcarea proiectului sau repornirea sistemului de control integrat. Uneltele noi pot fi definite ca fișier de configurare în directorul "Data/Tools"
Cutia virtuală
Gama de mișcări a brațului robot este limitată de setările cutiei virtuale. Această funcționalitate ajută la prevenirea deteriorărilor mecanice și simplifică programarea, în funcție de aplicație. Dacă se execută un program care încalcă caseta virtuală, acesta este oprit cu un mesaj de eroare.
Axa externă
Sistemul de control al robotului acceptă până la 3 axe suplimentare (denumite și "axă externă" în iRC). Acestea pot fi instalate în funcție de axele robotului și configurate prin intermediul zonei de configurare din iRC.

Program
Aici puteți defini robotul și programul logic, viteza de mișcare (ca procent din viteza maximă), modul de redare și reacția la erorile de program.
Cinematică specială
Sistemul de control al robotului poate fi personalizat pentru robotul dvs. cu un geamăn digital. Noi configurăm cinematica inversă în funcție de activitatea proiectului dvs.
Programare
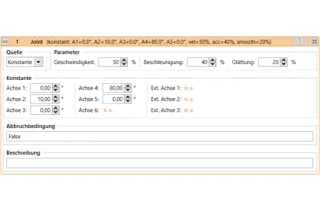
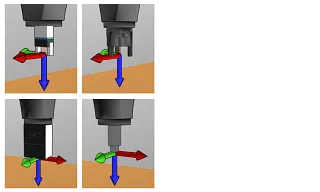
Mișcări pe axe
Comanda Articulare deplasează robotul către o poziție țintă absolută care este specificată în coordonatele axei (de exemplu, unghiul axei sau poziția unei axe liniare). Mișcarea rezultată a TCP este de obicei o curbă și nu o linie dreaptă.
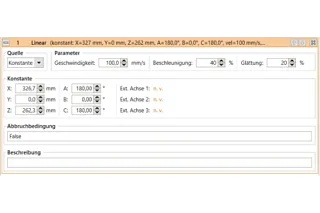
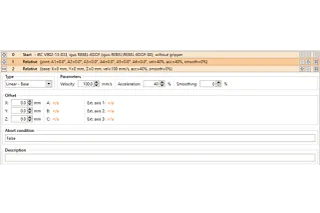
Mișcare liniară
Comanda Linear deplasează robotul către o poziție țintă absolută specificată în coordonate carteziene. Mișcarea rezultată a TCP urmează o linie dreaptă.
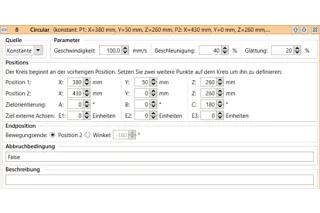
Mișcări circulare
Instrucțiunea "Circular movement" permite mișcări de-a lungul unei traiectorii circulare totale sau parțiale. Aceasta este compatibilă cu mișcările liniare, astfel încât tranziția de la și la mișcările liniare poate fi atenuată.
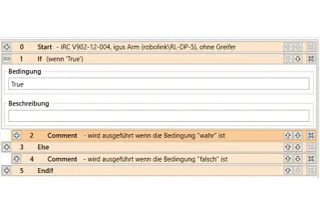
Condiții
Condițiile pot fi utilizate în comenzile if-then-else, în bucle și ca condiții de anulare în comenzile de mișcare. Condițiile pot fi combinații de intrări digitale, semnale globale, operații booleene și comparații.
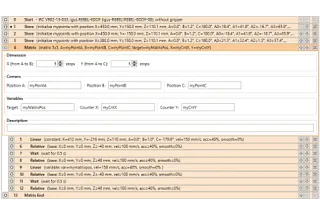
Calculul matricei
Instrucțiunile privind grila calculează pozițiile aliniate la o grilă, de exemplu, ca poziție de prindere sau de depunere pentru sarcinile de paletizare.
Relativ
Comanda Relativă vă permite să deplasați robotul în raport cu poziția sa curentă. Aceasta poate fi accesată prin intermediul elementelor de meniu de la "Acțiune" → "Mișcare relativă".

Subprograme
Subprogramele pot fi apelate cu subcomanda. Calea către fișierul subprogramului este specificată la "Nume fișier". Acesta este relativ la subfolderul "Programs" din folderul iRC "Data".
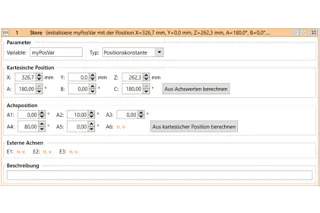
Variabile și accesul la variabile
Două tipuri de variabile sunt acceptate în programul pentru igus Robot Control și TinyCtrl:
- Variabile numerice: Acestea pot fi utilizate pentru a stoca numere întregi sau în virgulă mobilă.
- Variabile de poziție: Acestea pot fi utilizate pentru a stoca poziții carteziene și poziții ale articulațiilor. Depinde de context dacă o astfel de variabilă este interpretată ca o poziție carteziană sau ca o poziție a articulației.
Descărcați software-ul robot

Software-ul fără licență igus Robot Control este integrat în sistemul de control și, prin urmare, utilizează un concept de operare standardizat și servicii de comunicare coerente pentru multe componente ale unui sistem. Acest lucru înseamnă mai puțină muncă de planificare a proiectului și o punere în funcțiune mai rapidă.
- Testați toate cinematicile igus în avans în software
- Cu proiecte preprogramate pentru toți roboții igus, axele simple și AGV-urile
- Interfață 3D intuitivă cu simulare a robotului
Consultanta
Mi-ar face placere sa va raspund personal la întrebari
igus® GmbH+49 2203 9649-0Scrieti e-mail
Expediere și consultanță
În persoana:
Luni - Vineri de la 7 am la 8 pm.
Sâmbata de la 8 am la 12 pm.
Online:
24h